Challenge Tracks
In the challenge, we prepare 4 tracks covering the safety and security of both perception and control modules in autonomous driving. Two of the tracks aims to develop robust agents to deal with potential safety and security problems in scenarios. The other two tracks focus on designing scenarios that can attack agents. The detailed description of these tracks are introduced below.
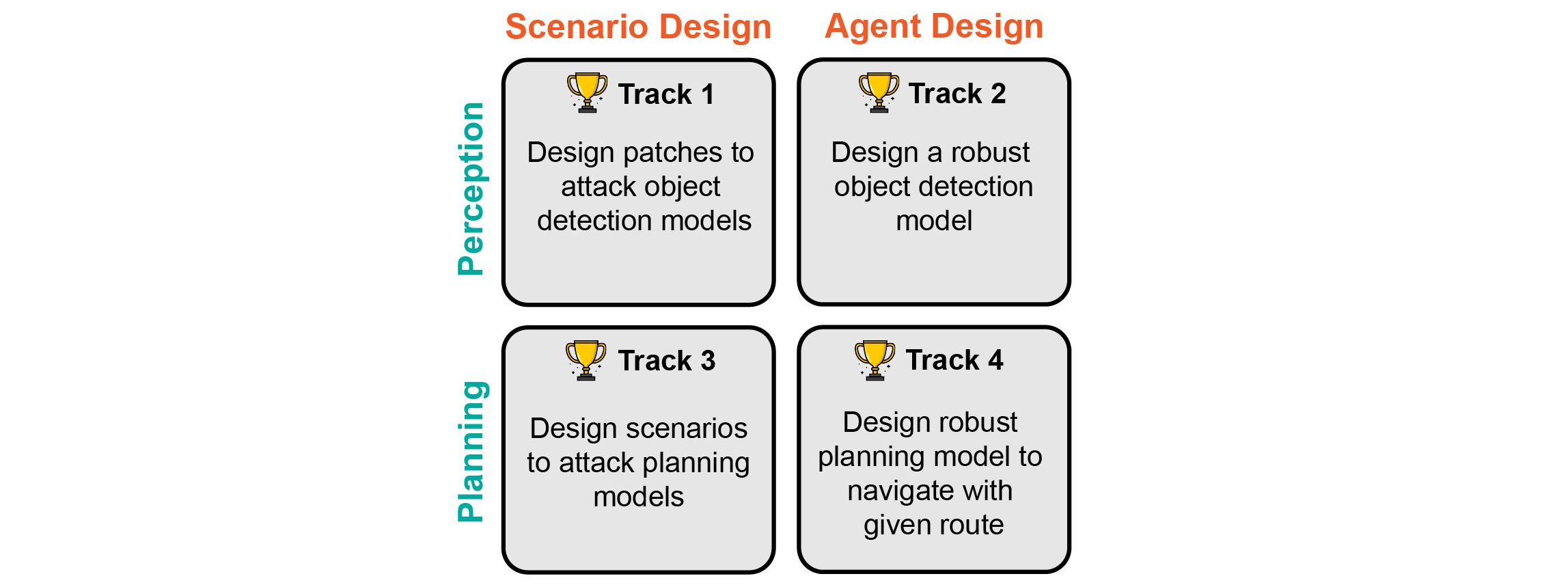
Track 1 (Perception Attack)
Mission
This track focuses on the object detection task. The goal is to design adversarial texture of traffic objects to attack the given object detection models. The victim models include both one-stage and two-stage models, including but not limited to Faster-RCNN, SSD, and YOLO-v5.
Metric
The metrics we evaluate are the average of mean Average Precision on 10 different IoU thresholds, i.e. mAP@[0.5:0.05:0.95].
Track 2 (Perception Defense)
Mission
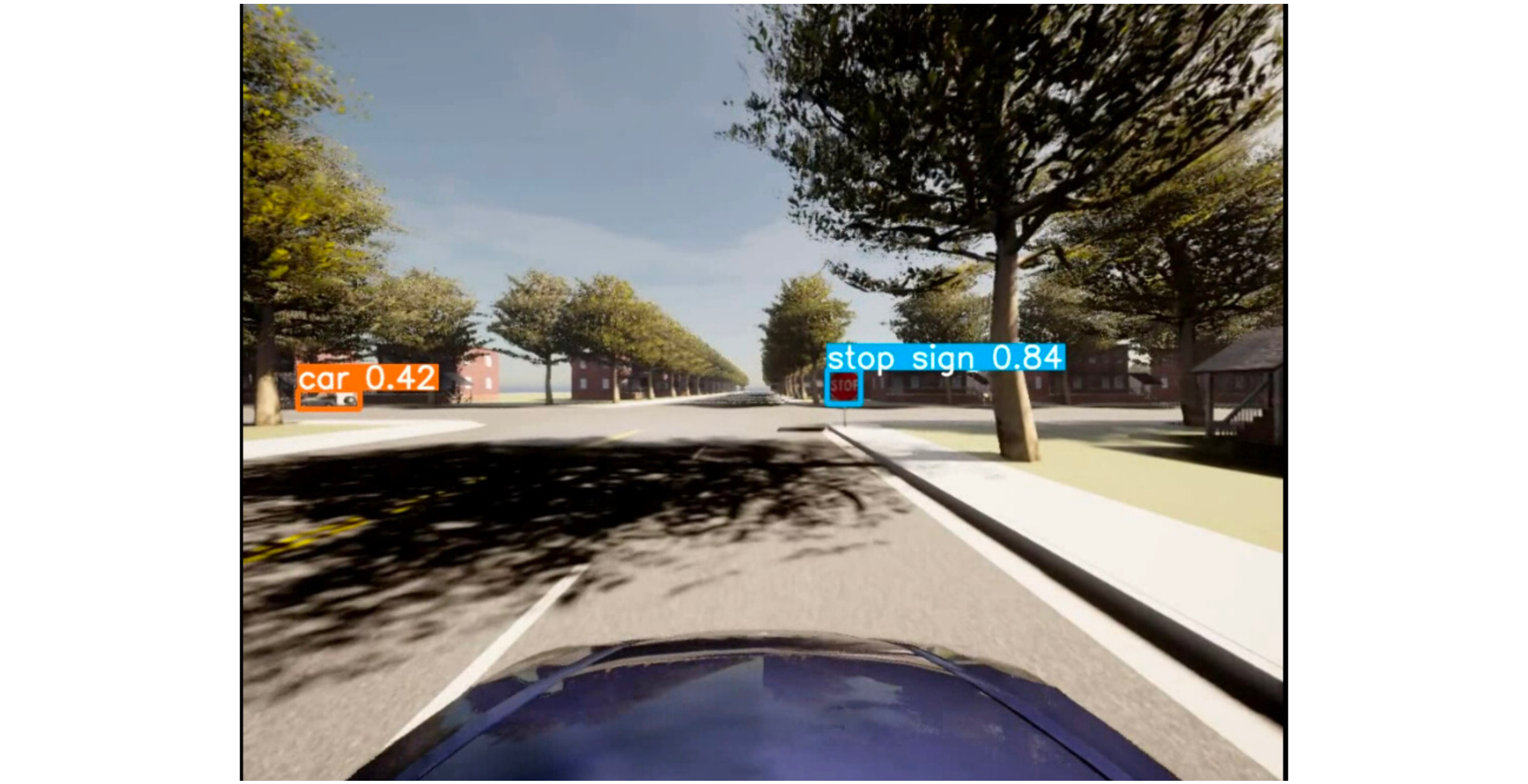
This track focuses on the object detection task for front view images. There are many powerful off-the-shelf models but they may not be strong enough to defense attacks happen traffic scenarios, e.g., a mask on stop sign. In this track, the participants are required to design a robust object detection model. This model will be evaluated under scenarios that contains attacks on textures of stop sign and surrounding vehicle.
Metric
The metrics we evaluate are the average of mean Average Precision on 10 different IoU thresholds, i.e. mAP@[0.5:0.05:0.95].
Track 3 (Planning Attack)
Mission
This track still focuses on control tasks but the goal is to design scenarios that can make agents either fail to finish the route or collide with other objects.
Metric
The metrics we evaluate are collision rate, out of road length, distance to driving route, incomplete driving route, and running time. We will calculate a final score based on the 5 metrics.
Track 4 (Planning Defense)
Mission
This track focuses on evaluating the safety and security of control models that follow a given route. We assume that the agent can access perfect observation, including the position and surrounding vehicles, traffic light status, and planning route. The goal is to design robust agents that can avoid collision and finish route.
Metric
The metrics we evaluate are collision rate, out of road length, distance to driving route, incomplete driving route, and running time. We will calculate a final score based on the 5 metrics.